|
.: Espaço
Cultural :.
Março,
marçagão, manhãs de inverno tardes de
verão!
Quando em Março arrulha a perdiz, ano
feliz.
Vento de Março e chuva de Abril, fazem o Maio
florir.
Se queres bom cabaço, semeia em Março.
Em
Março, tanto durmo como faço.
.:
The Reporting :.
Ora
cá estamos e cá vamos andando! (para nos metermos
na alheta?!)
Tanto
proverbio para este mês de Março vamos a ver o que é
que saiu dele, pois tal como o ultimo proverbio, tanto se dormiu
como se fez.
Março serviu para trabalhar e acabar e
testar quase a totalidade do hardware que havia para ser feito.
Como seria de esperar... todas as placas estavam bem projectadas
(pelo menos as partes mesmo necessarias), comprou-se material a
potes para montar a coisa, soldou-se, testou-se, ligou-se, etc...
Ao
principio havia a ideia de ter de usar 2 PIC's mas um pouco de
reflexão levou a pensar na possiblidade de fazer uma placa
de expansão de IO digitais e assim foi.. num fim de semana
ficou feita a placa, no inicio da semana a seguir, montada e
testada com sucesso. Esta placa servirá ainda para ligar a
TI83 (afinal vai ser a velha e fiel TI83).
As
placas foram todas interligadas ao PIC, o software foi programado
e testado.
Programaram-se as rotinas para os encoders,
controlo de velocidade e outros extras que nem parece que vao ser
usados...
No
final do mês começaram-se a programar as rotinas de
comunicação entre PIC e TI e digo desde já
que estão simplesmente (sim são simples)
magnificas!
A coisa não está nada complicada, o
PIC manda e recebe bytes, a TI manda e recebe bytes, não
há cá tramas, não há nada... you want
send 255 ? so 255 will be send!
A coisa também está
à prova de erros e para isso implementou-se um sistema de
timeout. A coisa está tão boa.. que se pode
desconectar a calculadora do PIC e ligar e tudo again e continua
a trabalhar alegremente. (Por acaso ao escrever isto tive uma
ideia magnifica! lol na verdade quando se desconecta a TI esta
para e tenta continuamente enviar o byte ao PIC ficando assim
tudo o programa em 'pause', o que é bem... o problema é
que o PIC não para, tenta ver se recebe alguma coisa da
calculadora, mas por exemplo se os motores estiverem a andar..
continuam a andar.. ora o k estou a pensar fazer será
chekar por demasiados timeouts e mandar parar o robot como se
tratasse de um paragem pelo botão STOP)
Bom
já chega de paleio, o que voces querem é fotos!
(e
a partir de agora acabou-se o problema de fotos! Temos 2 maquinas
digitais da equipa! fotos com fartura!)
.: Fotos
:.
(aka Show me the
product!)

Este
é o aspecto da mesa da sala do apartamento em plena altura
de trabalho!
(O garrafão é de água!
Existem muitos objectos estranhos em cima da mesa.. não
tentem adivinhar o k é! Lol)

E
aqui fica o aspecto da mesa depois de limpa e arrumada. Sim.. é
um puzzle de 1500 peças e foi feito em plena época
de aulas, mas ja foi a tanto tempo e ainda esta em cima da mesa a
espera de ser melhor tratado e pendurado...

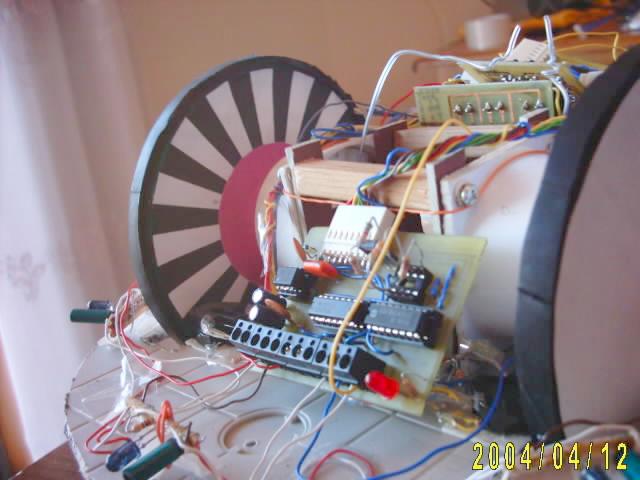
Oks
aki está! A coisa toda ligada e funcional! Reparem nos
sensores de encoders ao lado das rodas. A placa que se ve a
frente é a dos sensores mesmo aki a frente está um
sensor.. com o seu respectivo led Infravermelho e o photodiodo
com o tubinho... e muitos fios para ligar.

Mais
perto.... (ali do lado esquerdo.. em baixo.. akilo .. é um
obstaculo!)
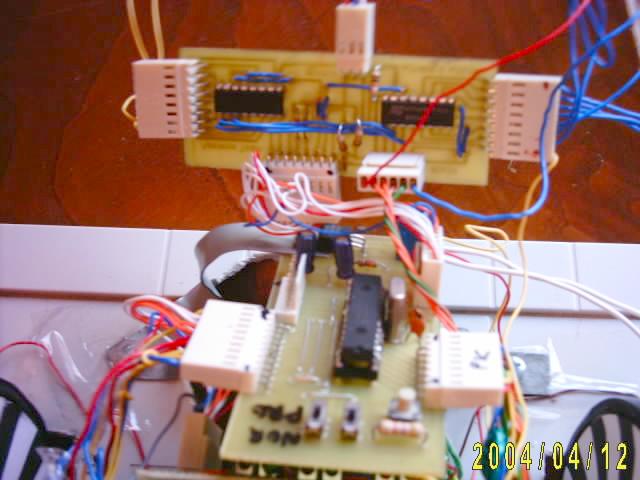
Em
cima a placa de expansão de IO digitais e a ligaçao
à TI (ligador do meio)
A placa em frente é a
placa do PIC base se repararem o LM7805 está ligado a uma
placa metalica para fazer a dissipação!!

Vista
geral por cima da paisagem, ha uma placa ai escondida na
imagem(dos motores).. mas é um easter egg (estamos em
alturas de páscoa...) tentem descobrir!
Vista
artistica lateral da coisa...

Imagem
artistica com motion blur real!
Não sei se dá
para notar.. mas o PIC foi soldado ao soket!! lol pk estava-se a
portar mal e a sair do sítio.. então.. pronto...
e
já chega de imagens por agora.. axo eu.. ou querem mais kk
coisa?
.: Allways in
motion the future is :.
Próximo
mês é tempo de muito trabalho. Acabar a extrutura do
robot, meter carapaça, botões, leds, suporte para a
TI, proteção, etc.
Tempo de pensar e programar o
código de navegação, ajustes finais e muito
tunning para conferir o habitual aspecto azeiteiro.
O report
do mês de abril, devivo ao enorme trabalho que nos espera
(cof cof), só poderá ser feito depois do
concurso.
Com
tão pouco tempo que nos resta, esperamos ter ao menos o
robot funcional de modo a passar a 'inspeção' e não
bater nos obstaculos.
Bye,
see you next time!
|