
Azeiteiro
II
@2002/2003
|
Para isto já há alguma coisa a dizer... NOME: O nome de prova do robot foi
Azeiteiro TT, nome que é parecido com Azeiteiro II, só
falta a barra em cima :) MATERIAL: KIT normal(pic16f876+etc.. ) da
organização do MR + Calculadora TI83
DESCRIÇÃO: Todas as decisões de controlo foram tomadas pela calculadora TI83, ou seja, qualquer movimento efectuado pelo robot era por ordem da TI83. Para isso usamos o kit PIC para fazer o
interface entre o 'real' e o software. Na calculadora existiam dois programas
principais, o programa geral de "controlo de navegação"
e um programa 'low level' de interface entre o PIC e o programa
geral. O programa geral, programado em Basic da TI como
dito atrás, possuía o programa geral de navegação
e tomada de decisões, ele enviava ao programa em assembly
o valor da acção a realizar e carregava valores de
variáveis com a informação (exemplo:
velocidade dos motores, estado dos led's,etc). Quando solicitado, o programa em assembly pedia valores ao PIC e depois guardava esses valores em variáveis normais da calculadora... para o programa geral continuar a sua execução. NAVEGAÇÃO: O programa geral de controlo tinha alguns algoritmos interessantes que descobrimos nesta edição. Conseguimos fazer um contorno de paredes e sair dele, procurar o farol e tentar seguir na sua direcção. Apesar de não termos encoders (calcular distancias percorridas e posições) o código era capaz de 'adivinhar' a posição do farol em relação a sua posição actual.. e alguns testes que fizemos o resultado foi bom. Ainda mesmo sem encoders, colocamos a calculadora a desenhar no seu ecrã o caminho percorrido pelo robot (ou o que achava que percorria) e ainda tinha código (já não me recordo como fazia hehe) de retorno! Para quem viu o robot no teste das especificações técnicas, pode ver que o robot foi ao farol, virou.. e veio para trás para perto da sua partida. Foi aqui que o robot esteve no seu melhor... O QUE CORREU MAL: "A communications disruption can mean only one thing... invasion" - Sio Bibble - Starwars Eps1 O robot nas duas mangas andou um bocado no inicio... e acabou por parar a meio... problemas nas comunicações :/ O programa em assembly da calculadora usava uma rotina para enviar os bytes e receber "built-in" da ROM da calculadora. O problema desta rotina é que era muito 'high level', ou seja.. funcionava entre o sistema operativo da TI e o nosso programa em assembly, o que lhe permitia sempre que houvessem "communications disruptions" o poder de cancelar a execução de todos os programas e mostrar um erro. Porque houveram erros? Há sempre erros!! Nós com essa rotina não podíamos proceder a um tratamento de erros. Não perguntem porque é que não programamos a nossa própria rotina.. e inclui-mos código de correcção porque já não me lembro o porque! Havia conhecimentos para isso e penso que também houve tempo, terá sido esquecimento? Não me parece porque durante os testes acontecia encravar as vezes, talvez não com tanta frequência... penso que serviu de lição para a próxima...
|
... e aí vão as fotos (shots, tiradas com a camera de filmar!) com legendas! ...
JoséOliveira(azul) Vs
MárioLuzeiro(castanho-claro)
(de costas para esconder a sua
identidade secreta)
e sempre com bastante audiência

Aquela é a irmã do Nesta não é?

O Mário a programar... enquanto o Oliveira discutia assuntos (pessoais?) com a Maria :)

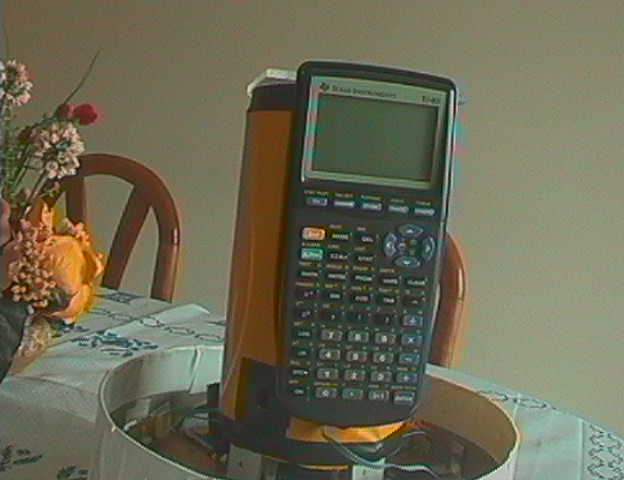
O Azeiteiro II com a sua característica
protecção amarelada (cor do azeite) a suportar a
calculadora atrás...
e reparem no pormenor de tunning que é
a parte de cima em verdadeiro acrílico!!

Aqui está ele na habitual foto de família...
.. e aqui ele ri-se dos que lá vão dentro! lol mas a seguir ia fazer pior figura!! hehe

logo após o arranque já vamos em ultimo!!! mas sem stress.. os outros à primeira curva derrapam logo!
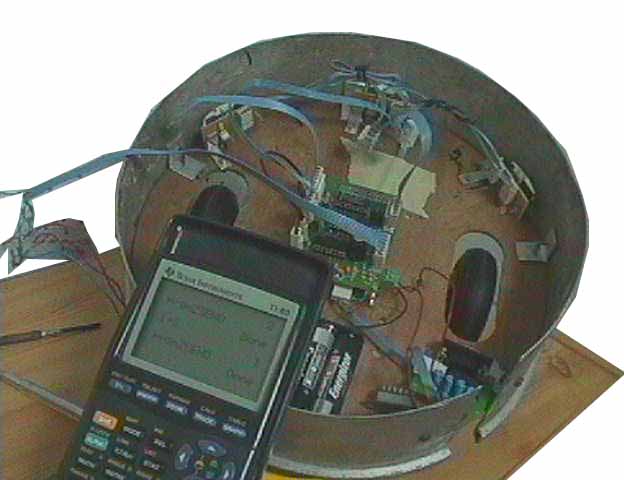
E agora, fotos muito íntimas do AzeiteiroII !!!

O cabo em cima é o cabo foi feito para
programar o Kit PIC, mas por acaso funcionou na perfeição
com o cabo usado pela camera
de filmar para tirar os screen shots
mais ao longe.
Testes de interface entre a TI e o PIC... num robot ainda recem-nascido...

Será que esta cor fica bem?! Não parece pela foto.. mas a cor é amarela.

Isto é o pormenor do sensor de chão
preto, seguro por fita cola :) nop.. ele tinha um parafuso mas
baloiçava entao
assim fica mais seguro.

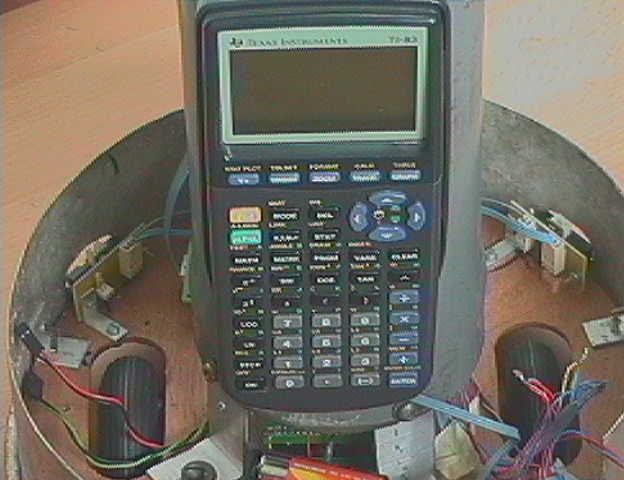
Vista geral da base por baixo.
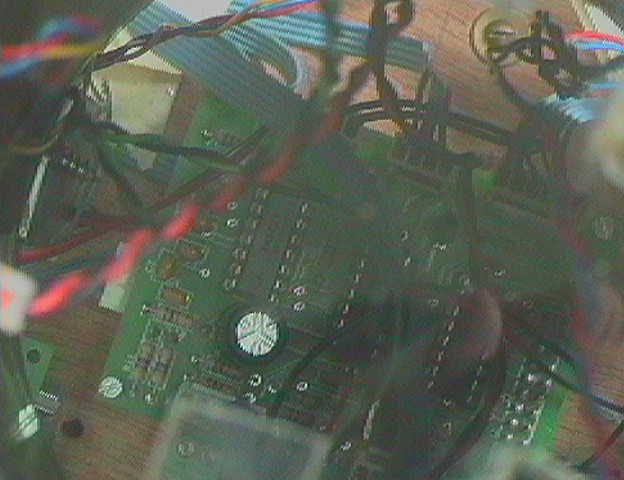
O Kit estava em baixo... mas dava para ver por cima...

vista geral por cima...
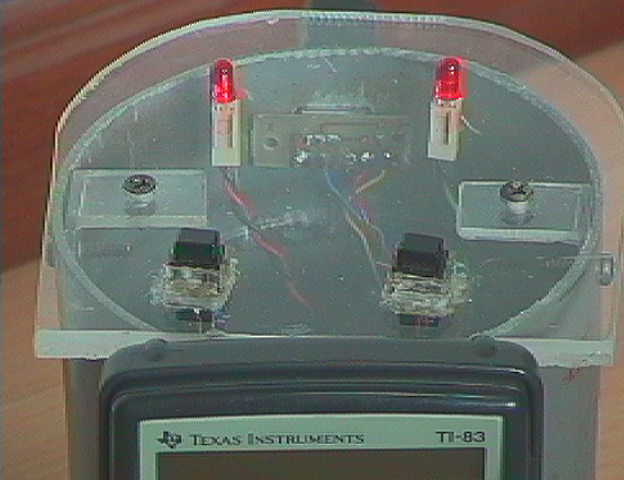
Sim.. ti-83, botoes colados com 'plastico' e os leds
a suportar os suportes :)
A frente dá para ver as ligações
do sensor de farol.
Visto por tráz... aqueles fios do lado esquerdo são os dos LED's.. e sao 'fichas' de leds de um PC...

e agora de lado (o CD é para comparar o tamanho hehe )

e do outro lado...

e de frente...

Aqui estão duas belissimas fotos tiradas 1ou 2 dias (ou talvez mais) antes do evento

zaas... desmontar tudo agora....
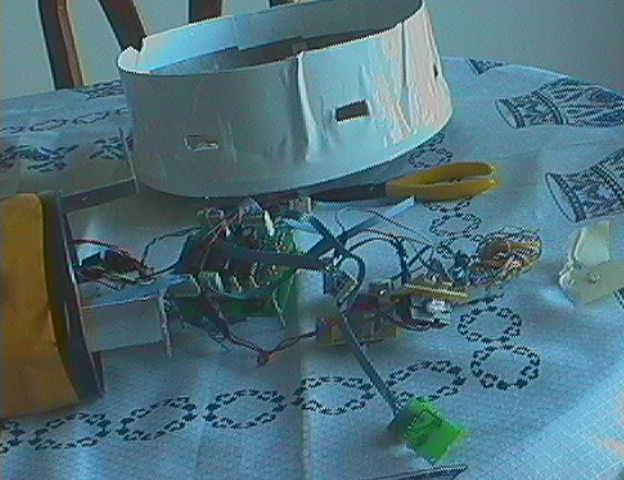
.. e agora tirar as fichas todas..

;(
Para o ano há mais...
Tudo desmontado
pronto a ser devolvido à organização!
.: Fotos da Organização:.
(Clikar
para ver maior)


@ 2003-2004 azeiteiro team