Safe Lane
PEDESTRIAN AND RISK SITUATIONS DETECTION SYSTEM IN A CROSSWALK
Our motive
Despite the current road security measures, the unpredictability of action of the subjects involved in a crosswalk continues to be a safety challenge, while not counting crosswalks placed in low visibility locations where incidents are most frequent.
This is what motivated us to develop an accessible and adaptable system that is able to better monitor the crosswalk. Its purpose is to detect pedestrians and predict possible risk situations, while generating information for both the pedestrians and the drivers that are about to reach the location. It will detect and identify the pedestrians' positions, while lighting up the crosswalk when its being crossed, display the speed of incoming cars and identify cases of excessive speed.

HOW IT WORKS
Architecture

The product can be mediated into two parts structurally.
The first part consists on the data gathering and processing. The information we collect from the crosswalk and the road is obtained through radars, which is then sent to a processing unit. The second one can be split in two ways of communication between the user and the system: an user interface that is made solely for debugging/demonstration, to observe a plot of the location and accompanying info, along with algorithmic results and statistic information, and a one way only display of information to the users of the crosswalk, composed by the signalling lights and the speed display. The first part won't be available on the final product applied to the crosswalk.
Base module
The base module that this project is based around is the IWR1642 RADAR chip, developed by Texas Instruments, which sends FMCW (Frequency Modulated Continuous Wave) signals and receives the resulting reflections of that signal in order to identify the subjects' positions and corresponding movement speed. This modules allows us to gather more precise results and is even able to measure under intense weather, contrary to systems based on infra-red signals, while safeguarding the privacy of the pedestrians and following accordingly to privacy laws by avoiding the use of camera-based solutions.
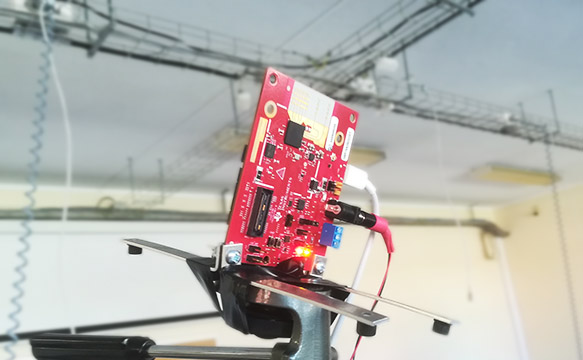
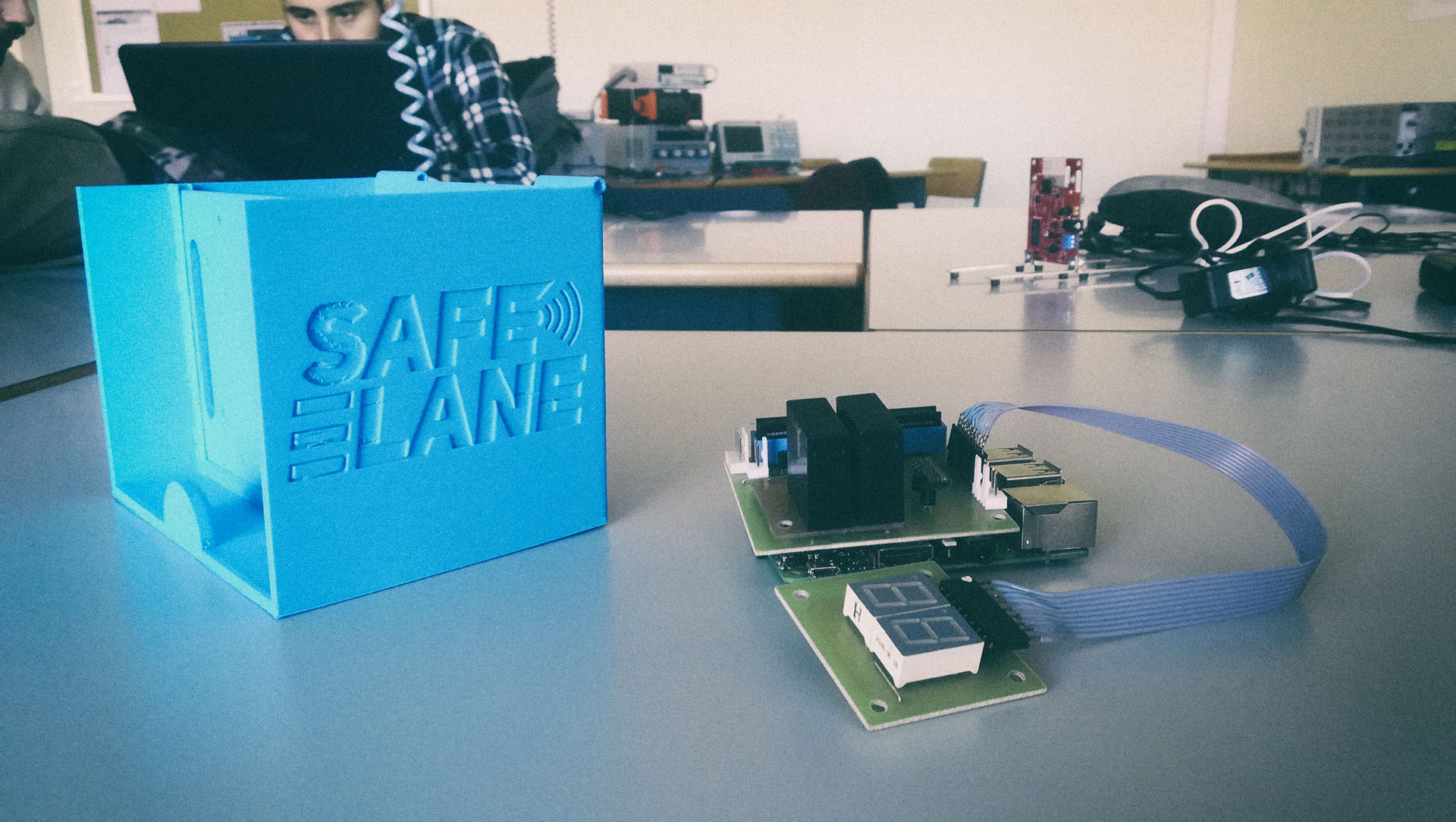
The info sent by the radar is then received by a Raspberry Pi 3b via UART, and it's responsible for processing the data, as well as sending the resulting signals to the developed PCB. This circuit is able to activate the lights accordingly and to display velocity that on an HEX display, while also being able to supply enough current for their operation. This system is contained in an enclosure designed by our team.
Despite the initial code and tests being made through MATLAB, all the final software responsible for data processing is developed in Python, due to its strong combability with the RPi system and lighter processing power requirement to run.
WHAT WE ARE WORKING ON
Our biggest challenge is working with the radar, which its usage in small scale applications such as these is still recent and available research around it is still scarce. We're constantly updating our algorithms and trying out different methods in order to improve our results.
In the future, we plan to develop algorithms capable of predicting risky situations and have a more complete alert system that is also capable of contacting authorities.








(automatic slideshow)